Simulation
This section contains information on the most up-to-date simulation solutions.
Quickstart PyBullet
I have deployed a 12-point Bezier Curve gait to make Spot walk:
This example can be found in this repository. You can optionally use a Game Pad:
pip3 install numpy
pip3 install pybullet
pip3 install gym
cd spot_bullet/src
./env_tester.py
Optional Arguments
-h, --help show this help message and exit
-hf, --HeightField Use HeightField
-r, --DebugRack Put Spot on an Elevated Rack
-p, --DebugPath Draw Spot's Foot Path
-ay, --AutoYaw Automatically Adjust Spot's Yaw
If you decide to use a controller, you can achieve some fairly fluid motions!
Changing Step Length:
Yaw in Place:
Quickstart for ROS
There is also a first ROSification of SpotMicroAI.
First of all install ROS. I use Melodic, but it should work with Kinetic, too. I will not go into detail on how to install ROS because there are many good Tutorials out there.
When finished installing ROS:
cd ~/catkin_ws/src
git clone https://github.com/FlorianWilk/SpotMicroAI.git
cd ..
catkin_make
source ./devel/setup.bash
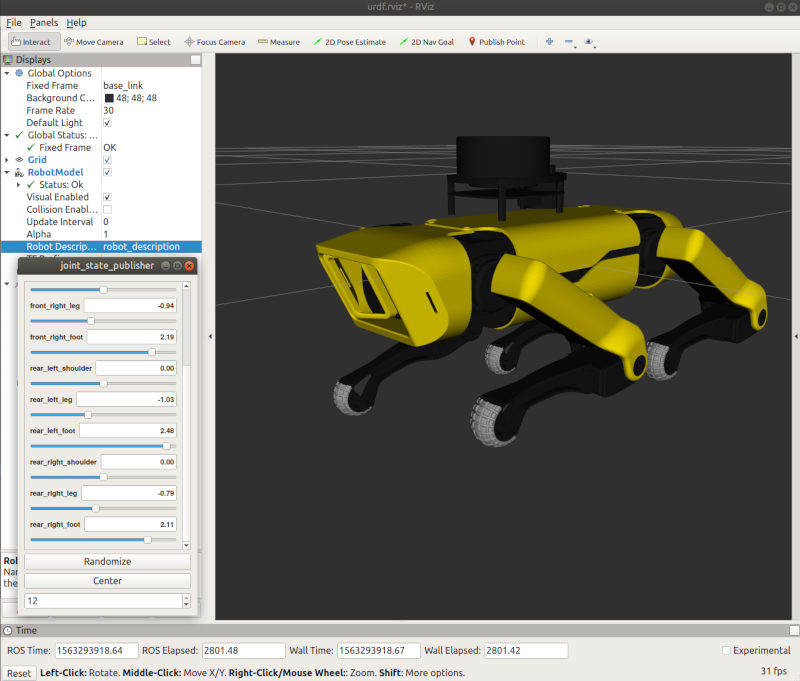
roslaunch spotmicroai showmodel.launch
This will show up RVIZ with the Model of SpotMicroAI.
Kinematics
In order to be able to move the Robot or even make it walk, we need something which tells us what servo-angles will be needed for a Leg to reach position XYZ. This is what InverseKinematics does. We know all the constraints, the length of the legs, how the joints rotate and where they are positioned.
You can find some a first draft of the calculations here. There is also a Jupyter Notebook explaining the Kinematics and a YouTube-Video.
In this repository, there is a working IK solver for both Spot's legs and its body: